Human Control System Case Study
Introduction
Nowadays, machines are a part of every element of how people live their lives, whether they are actively directing them or passively receiving services from them. The phrase “human-in-the-loop” is frequently used in the control system works to describe how people interact with physical systems. The term human in the loop is used to describe situations when a human is either totally or partially controlling a system or a machine. The regulator is observed as energetic if it was trained by precise switch exploiters. (Ikeura, 2018). The term “human-in-the-loop” can also refer to a person who is in today’s world, humans engage with technology in all facets of their life.
Either actively operating the equipment or merely receiving services from it. The phrase human in the loop is frequently used in the control lerschemen on fiction to define how people interact with physical systems. The term human in the loop is used to describe situations when a human is either totally or partially in control of a system or machine. If the control was exerted using control manipulators, it is considered to be active. The phrase “human-in-the-loop” can also indicate “the Today, whether individuals are actively operating them or passively using them for services, machines are a part of every aspect of how they live their lives. The term “human-in-the-loop” is commonly used to explain how people and physical systems interact in control theory literature. When a machine or system is entirely or partially managed by a human, that person is said to be “in the loop.” If control was exercised using control manipulators, it is considered to be active.
Another meaning of the phrase “human in the loop” is a passive person who is being monitored or perhaps controlled by a machine. The human observes the system output in the active person in the loop arrangement, possibly on a display, where they can keep an eye on all the information they need to update their control decisions or actions.
Results
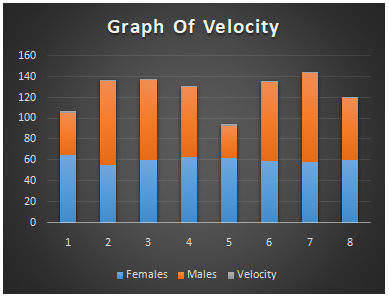 This Graph showing velocity for Males vs Females
This Graph showing velocity for Males vs Females
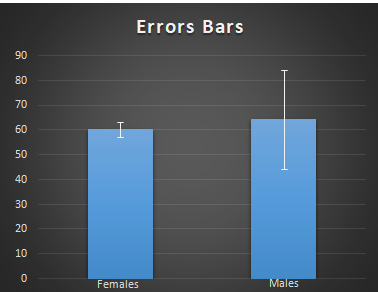 This graph showing the maximum errors in Males compare to Females
This graph showing the maximum errors in Males compare to Females
 This is the descriptive analysis of the given dataset. The output of the results is Positive
This is the descriptive analysis of the given dataset. The output of the results is Positive
relationship between Males and Females
Discussion
Human physical limitations and behavioral characteristics is essential to a true understanding of the human-machine interface. This incorporates a variety of factors, including how humans interpret information, the limitations of their sensory system, and how they make decisions. It is becoming increasingly obvious that human behavior and responses within the cyber-physical control loops differ fundamentally from those of physical controllers. This is due to the distinction between humans’ biological nature and machines’ artificial and cyber-physical nature. This disparity in many respects makes it difficult to comprehend human-machine systems.
Humans are capable of learning new information in a variety of methods, which is a distinctive trait of people (FeldmanHall, 2019). This information enables people to become more capable and experienced. The idea of learning differs in humans from that of machine learning, which is ultimately statistical learning. Because humans are highly adaptable beings, they can adjust to changes in their surroundings. Humans have a relatively high level of adaptation due to their capacity for learning and anticipatory behavior (Jahanshahi, 2019). Adaptive control systems, for example, are examples of dynamical systems that can be categorized as an adaptive systems. The idea of adaptation in humans, however, is more complex and intricate. For example, human beings have the capacity to adjust to both various regulated dynamics and diverse operational situations.
The person-in-the-loop study field with the most visitors right now is model identification for human behaviors. The primary creator of the majority of human models was control theory. Strong progress has been made during the 1960s in identifying an appropriate model that accurately represents manual control behavior. The majority of these models took cues from programs like airspace, which modelled the pilot in real life. The first models for human operators that were oriented toward control theory were recognized (Wang, 2021). The control element for a human operator was modelled as a servomechanism with sensors and actuators….
Human Control System Case StudyThis is just a sample partial case solution. Please place the order on the website to order your own originally done case solution.
How We Work?
Just email us your case materials and instructions to order@thecasesolutions.com and confirm your order by making the payment here


